
1. ระบบอัตโนมัติภายในบ้าน Arduino
 การพัฒนาระบบติดตามแสงอาทิตย์โดยใช้ Arduino เป็นโครงการที่มีวัตถุประสงค์หลายอย่าง โดยมุ่งเน้นความเหมาะสมของการใช้พลังงานแสงอาทิตย์ และปรับปริมาณแสงแดดที่ได้รับจากแผงโซลาร์เซลล์ให้เหมาะสม
การพัฒนาระบบติดตามแสงอาทิตย์โดยใช้ Arduino เป็นโครงการที่มีวัตถุประสงค์หลายอย่าง โดยมุ่งเน้นความเหมาะสมของการใช้พลังงานแสงอาทิตย์ และปรับปริมาณแสงแดดที่ได้รับจากแผงโซลาร์เซลล์ให้เหมาะสม
ส่วนประกอบที่จำเป็น
- Arduino Uno
- โมดูลรีเลย์
- โมดูล Wi-Fi ESP8266
- สายจัมเปอร์
- พาวเวอร์ซัพพลาย
- หลอดไฟพร้อมที่จับ
- ตัวต้านทาน
ขั้นตอนการติดตั้ง
1. การตั้งค่า Arduino Uno : เชื่อมต่อ Arduino Uno เข้ากับรีเลย์และโมดูล ESP8266
2. การเขียนโปรแกรม Arduino : ใช้ Arduino IDE เพื่อเขียนและอัปโหลดโปรแกรมที่รับคำสั่งจากแอปและควบคุมโมดูลรีเลย์ตามนั้น
3. การพัฒนาแอปหรืออินเทอร์เฟซเว็บ : สร้างอินเทอร์เฟซผู้ใช้ที่ส่งคำสั่งเฉพาะไปยัง Arduino เพื่อควบคุมอุปกรณ์ที่เชื่อมต่อ
4. การทดสอบ : ทดสอบระบบด้วยอุปกรณ์ต่างๆ เพื่อให้มั่นใจถึงความเสถียรและการตอบสนอง
โค้ดแนะนำ
- #include <ESP8266WiFi.h>
- const char* ssid = “your-SSID”;
- const char* password = “your-PASSWORD”;
- WiFiServer server(80);
- void setup() {
- Serial.begin(115200);
- pinMode(2, OUTPUT);
- digitalWrite(2, HIGH);
- WiFi.begin(ssid, password);
- while (WiFi.status() != WL_CONNECTED)
- delay(1000);
- Serial.println(“Connecting to WiFi…”);
- server.begin();
- void loop() {
- WiFiClient client = server.available();
- if (client) {
- String request = client.readStringUntil(‘\r’);
- client.flush();
- if (request.indexOf(“/ON”) != -1) {
- digitalWrite(2, HIGH);
- if (request.indexOf(“/OFF”) != -1) {
- digitalWrite(2, LOW);
- client.println(“HTTP/1.1 200 OK”);
- client.println(“Content-Type: text/html”);
- client.println(“”);
- client.println(“<!DOCTYPE HTML>”);
- client.println(“<html>”);
- client.println(“<body><h1>Home Automation</h1></body>”);
- client.println(“</html>”);
- delay(1);
2. เครื่องติดตามแสงอาทิตย์ที่ใช้ Arduino
 การพัฒนาระบบติดตามแสงอาทิตย์โดยใช้ Arduino เป็นโครงการที่มีวัตถุประสงค์หลายอย่าง โดยมุ่งเน้นความเหมาะสมของการใช้พลังงานแสงอาทิตย์ และปรับปริมาณแสงแดดที่ได้รับจากแผงโซลาร์เซลล์ให้เหมาะสม
การพัฒนาระบบติดตามแสงอาทิตย์โดยใช้ Arduino เป็นโครงการที่มีวัตถุประสงค์หลายอย่าง โดยมุ่งเน้นความเหมาะสมของการใช้พลังงานแสงอาทิตย์ และปรับปริมาณแสงแดดที่ได้รับจากแผงโซลาร์เซลล์ให้เหมาะสม

ส่วนประกอบที่จำเป็น
- Arduino Uno
- แผงเซลล์แสงอาทิตย์
- เซอร์โวมอเตอร์
- LDR หรือ Light Dependent Resistors (ตัวต้านทานปรับค่าตามแสง)
- ตัวต้านทาน
- Breadboard
- สายจัมเปอร์
- คำแนะนำ
ประกอบส่วนประกอบ : การพัฒนาระบบติดตามแสงอาทิตย์โดยใช้ Arduino เริ่มต้นด้วยการติดตั้ง LDR (Light Dependent Resistor) บนขอบของแผงโซลาร์เซลล์ และเชื่อมต่อกับ Arduino โดยมีการเชื่อมต่อเซอร์โวมอเตอร์เพื่อปรับปริมาณแสงที่ได้รับ
การเขียนโปรแกรม Arduino : เขียนโปรแกรมเพื่อเปรียบเทียบความเข้มของแสงบน LDR และย้ายเซอร์โวมอเตอร์เพื่อวางตำแหน่งแผงโซลาร์เซลล์ไปทางด้านสว่าง
การทดสอบและการเพิ่มประสิทธิภาพ : ทดสอบระบบภายใต้สภาพแสงที่แตกต่างกันและปรับโค้ดให้เหมาะสมเพื่อความแม่นยำที่ดีขึ้น
โค้ดแนะนำ
- #include <Servo.h>
- Servo myservo;
- int sensorPin1 = A0;
- int sensorPin2 = A1;
- int threshold = 5;
- void setup() {
- myservo.attach(9);
- void loop() {
- int val1 = analogRead(sensorPin1);
- int val2 = analogRead(sensorPin2);
- if (abs(val1 – val2) > threshold) {
- int pos = map(abs(val1 – val2), 0, 1023, 0, 180);
- myservo.write(pos);
3. ระบบชลประทานอัจฉริยะ
สร้างระบบชลประทานอัจฉริยะที่ใช้ Arduino เพื่อตรวจสอบระดับความชื้นในดินและรดน้ำต้นไม้ตามที่กำหนด
ส่วนประกอบที่จำเป็น
- Arduino Uno
- เซ็นเซอร์ความชื้นในดิน
- โมดูลรีเลย์
- ปั๊มน้ำ
- ท่อ
- พาวเวอร์ซัพพลาย
ขั้นตอนการติดตั้ง
การประกอบ : การประกอบและเชื่อมต่อเซ็นเซอร์ความชื้นในดินเข้ากับ Arduino เพื่อควบคุมรีเลย์และปั๊มน้ำเป็นขั้นตอนที่สำคัญในการสร้างระบบรดน้ำอัตโนมัติของพืชหรือสวนเพาะปลูก
การเขียนโปรแกรม : การเขียนโปรแกรมเพื่อติดตามระดับความชื้นในดินและเปิดใช้งานปั๊มน้ำเมื่อระดับความชื้นต่ำกว่าเกณฑ์ที่กำหนดเป็นกระบวนการสำคัญในการควบคุมการรดน้ำให้พืชหรือสวนเพาะปลูก
โค้ดแนะนำ
- int moisturePin = A0;
- int waterPump = 2;
- int threshold = 200;
- void setup() {
- pinMode(moisturePin, INPUT);
- pinMode(waterPump, OUTPUT);
- void loop() {
- int moistureValue = analogRead(moisturePin);
- if (moistureValue < threshold) {
- digitalWrite(waterPump, HIGH);
- } else {
- digitalWrite(waterPump, LOW);
- delay(1000);
4. จอแสดงผล LED Matrix ขับเคลื่อนด้วย Arduino
 ออกแบบจอแสดงผล LED Matrix ที่ปรับแต่งได้ซึ่งขับเคลื่อนโดย Arduino เพื่อแสดงข้อความแบบเลื่อนหรือกราฟิกตามที่กำหนด
ออกแบบจอแสดงผล LED Matrix ที่ปรับแต่งได้ซึ่งขับเคลื่อนโดย Arduino เพื่อแสดงข้อความแบบเลื่อนหรือกราฟิกตามที่กำหนด
ส่วนประกอบที่จำเป็น
- Arduino Uno
- LED Matrix
- ไดร์เวอร์ MAX7219
- สายจัมเปอร์
- พาวเวอร์ซัพพลาย
ขั้นตอนการติดตั้ง
การประกอบ : เชื่อมต่อ LED Matrix เข้ากับ Arduino โดยใช้ไดรเวอร์ MAX7219
การเขียนโปรแกรม : เขียนโปรแกรมเพื่อควบคุม LED แต่ละดวงเพื่อแสดงตัวอักษรหรือกราฟิก และเพื่อเลื่อนข้อความ
การทดสอบ : ทดสอบข้อความและกราฟิกต่างๆ และปรับความเร็วการเลื่อนและความสว่างของจอแสดงผลให้เหมาะสม
โค้ดแนะนำ
- #include <LedControl.h>
- LedControl lc = LedControl(12, 11, 10, 1);
- void setup() {
- lc.shutdown(0, false);
- lc.setIntensity(0, 8);
- lc.clearDisplay(0);
- void loop() {
- lc.setChar(0, 0, ‘H’, false);
- delay(500);
- lc.setChar(0, 1, ‘E’, false);
- delay(500);
- lc.setChar(0, 2, ‘L’, false);
- delay(500);
- lc.setChar(0, 3, ‘L’, false);
- delay(500);
- lc.setChar(0, 4, ‘O’, false);
- delay(500);
- lc.clearDisplay(0);
- delay(1000);
5. หุ่นยนต์ติดตามด้วย Arduino
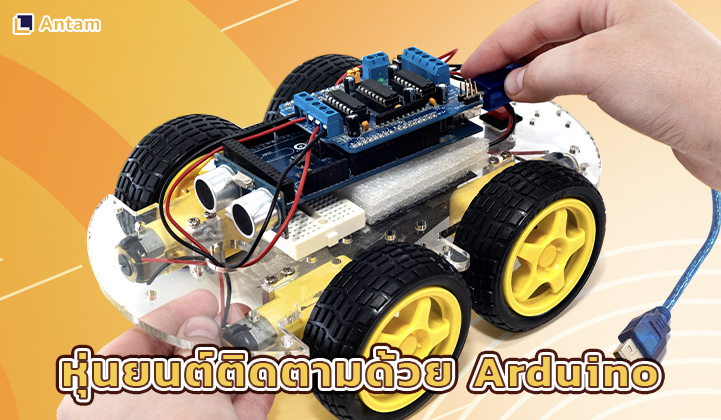 การสร้างหุ่นยนต์ตามเส้นโดยใช้ Arduino เป็นโครงการที่น่าสนใจและสอดคล้องกับหลายแนวทางการพัฒนาหุ่นยนต์ ซึ่งสามารถใช้ Arduino สร้างการเดินตามเส้นทางที่กำหนดไว้ล่วงหน้าที่ทำเครื่องหมายไว้บนพื้น
การสร้างหุ่นยนต์ตามเส้นโดยใช้ Arduino เป็นโครงการที่น่าสนใจและสอดคล้องกับหลายแนวทางการพัฒนาหุ่นยนต์ ซึ่งสามารถใช้ Arduino สร้างการเดินตามเส้นทางที่กำหนดไว้ล่วงหน้าที่ทำเครื่องหมายไว้บนพื้น
ส่วนประกอบที่จำเป็น
- Arduino Uno
- Motor Driver (L298N)
- มอเตอร์กระแสตรง
- เซ็นเซอร์อินฟราเรด
- ล้อ
- Chassis
- แบตเตอรี่
ขั้นตอนการติดตั้ง
ประกอบหุ่นยนต์ : ติดมอเตอร์เข้ากับแชสซี เชื่อมต่อล้อเข้ากับมอเตอร์ และวางเซ็นเซอร์อินฟราเรดไว้ที่ด้านหน้า
เชื่อมต่อกับ Arduino : เชื่อมต่อไดรเวอร์มอเตอร์และเซ็นเซอร์อินฟราเรดเข้ากับ Arduino
การเขียนโปรแกรม : เขียนโปรแกรมอ่านอินพุตจากเซนเซอร์อินฟราเรดและควบคุมมอเตอร์ให้เดินตามเส้น
การทดสอบ : ทดสอบหุ่นยนต์บนเส้นทางที่แตกต่างกันและปรับโปรแกรมเพื่อประสิทธิภาพสูงสุด
โค้ดแนะนำ
- int leftSensor = 2;
- int rightSensor = 3;
- int leftMotorForward = 4;
- int leftMotorBackward = 5;
- int rightMotorForward = 6;
- int rightMotorBackward = 7;
- void setup() {
- pinMode(leftSensor, INPUT);
- pinMode(rightSensor, INPUT);
- pinMode(leftMotorForward, OUTPUT);
- pinMode(leftMotorBackward, OUTPUT);
- pinMode(rightMotorForward, OUTPUT);
- pinMode(rightMotorBackward, OUTPUT);
- void loop() {
- int leftSensorValue = digitalRead(leftSensor);
- int rightSensorValue = digitalRead(rightSensor);
- if (leftSensorValue && rightSensorValue)
- forward();
- else if (!leftSensorValue && rightSensorValue)
- turnLeft();
- else if (leftSensorValue && !rightSensorValue)
- turnRight();
- else
- stop();
- void forward() {
- digitalWrite(leftMotorForward, HIGH);
- digitalWrite(leftMotorBackward, LOW);
- digitalWrite(rightMotorForward, HIGH);
- digitalWrite(rightMotorBackward, LOW);
- void turnLeft() {
- digitalWrite(leftMotorForward, LOW);
- digitalWrite(leftMotorBackward, HIGH);
- digitalWrite(rightMotorForward, HIGH);
- digitalWrite(rightMotorBackward, LOW);
- void turnRight() {
- digitalWrite(leftMotorForward, HIGH);
- digitalWrite(leftMotorBackward, LOW);
- digitalWrite(rightMotorForward, LOW);
- digitalWrite(rightMotorBackward, HIGH);
- void stop() {
- digitalWrite(leftMotorForward, LOW);
- digitalWrite(leftMotorBackward, LOW);
- digitalWrite(rightMotorForward, LOW);
- digitalWrite(rightMotorBackward, LOW);
สรุป
การเขียนโค้ดและสร้างโปรเจคต่างๆ บนคอมพิวเตอร์ไม่ว่าจะเป็นแอพพลิเคชันหรือซอฟแวร์ใดๆ ก็เปรียบเสมือนการสร้างโมเดลรถยนต์ที่เราออกแบบขึ้นมาใหม่ โดยทั้งหมดนี้เริ่มต้นจากแบบจำลองหรือ prototype ก่อนที่จะเป็นสิ่งจริงจังที่ใช้งานได้จริง โค้ดและโปรเจคเหล่านี้จึงเหมือนกับแบบจำลองแรกๆ ของรถยนต์ที่ยังต้องปรับแต่งให้เข้ากับความต้องการและเป้าหมายของเราอย่างแม่นยำก่อนที่จะพร้อมที่จะวิ่งอย่างมั่นคงในสภาพแวดล้อมที่หลากหลาย